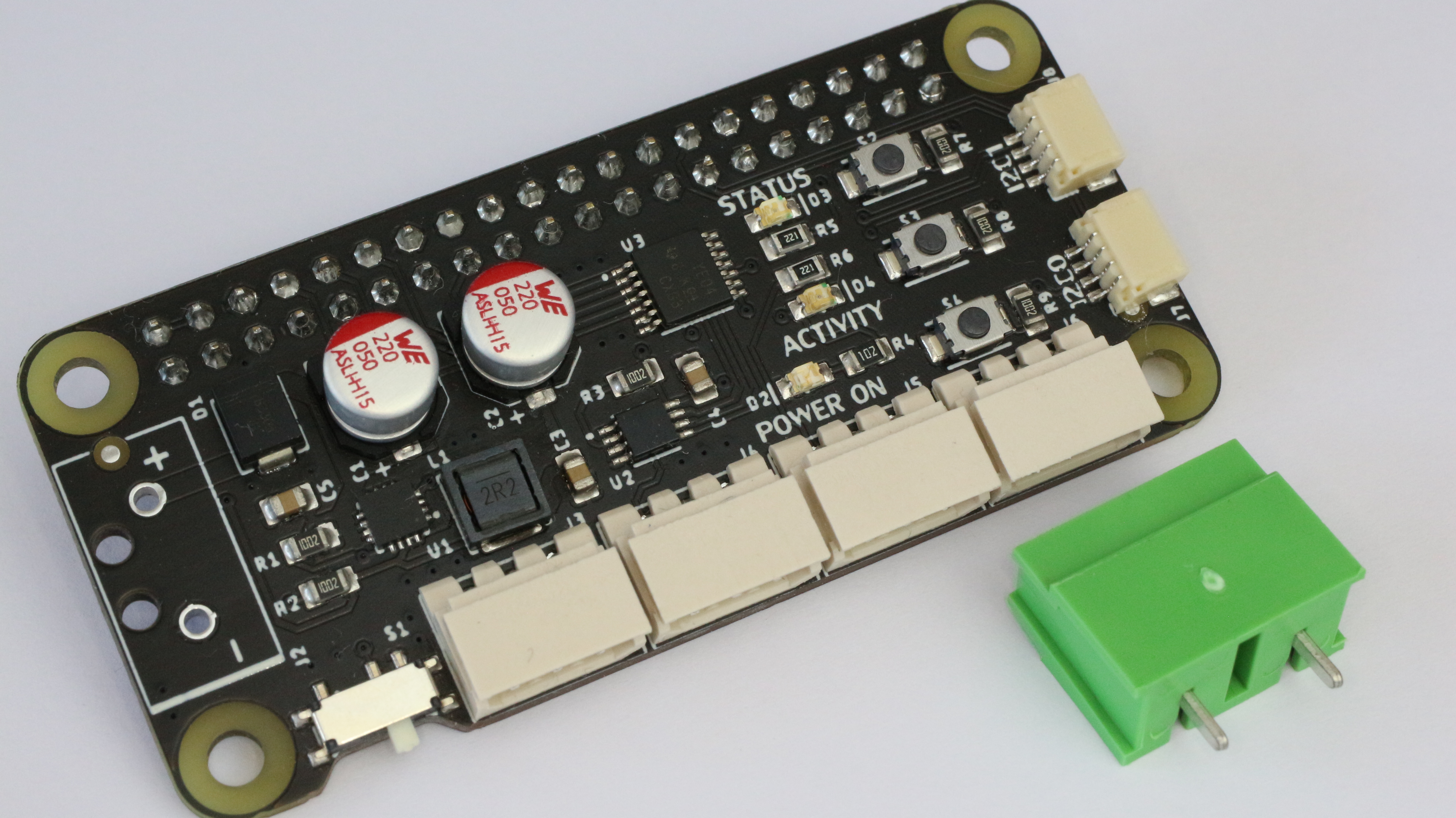
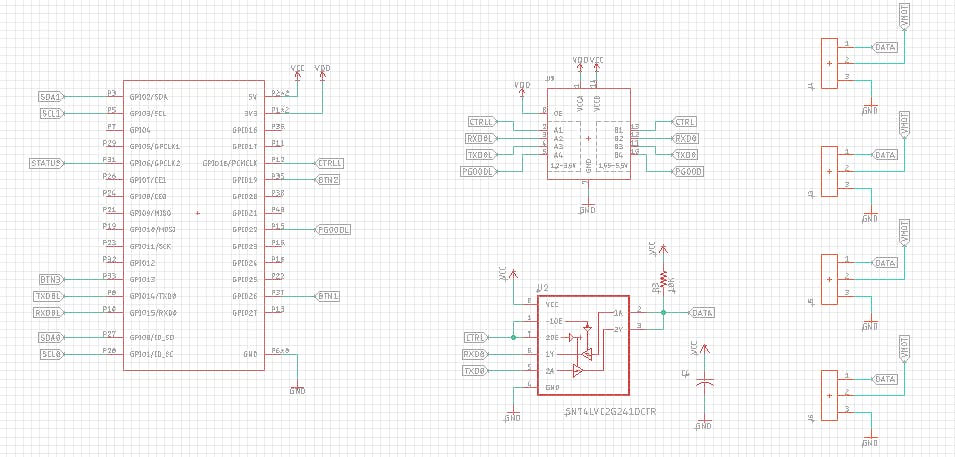
The Dynamixel Hat is a board capable of communicating the raspberry Pi ( Serial ) with the Dynamixel servos by using the 74LS241 Tri-state Buffer connected to 3-pin Molex connectors.
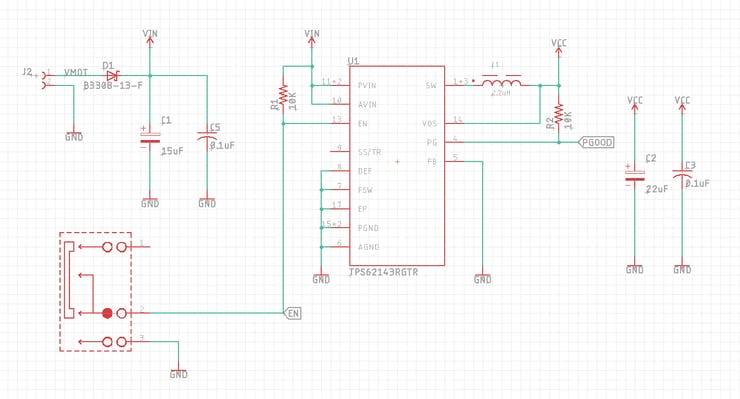
The board contains a TI TPS62143 regulator that steps down the voltage to power up the Raspberry Pi Zero that can be power on or off with the onboard slide switch. The TPS62143 is a synchronous step-down DC-DC converter optimized for applications with high power density.
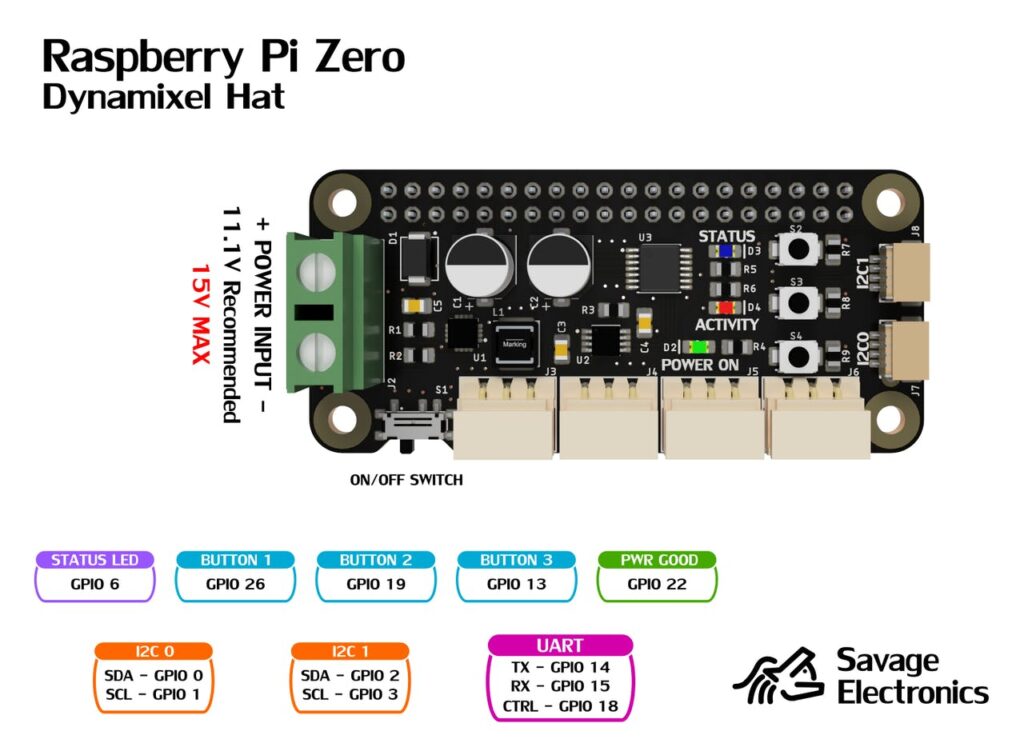
This board accepts 2S and 3S Lipo batteries, the DC-DC converter accepts up to 17 Volts but the motors recommended voltage is 11.1V ( 3S Lipo ) as the MAX Input voltage is around 16 Volts.
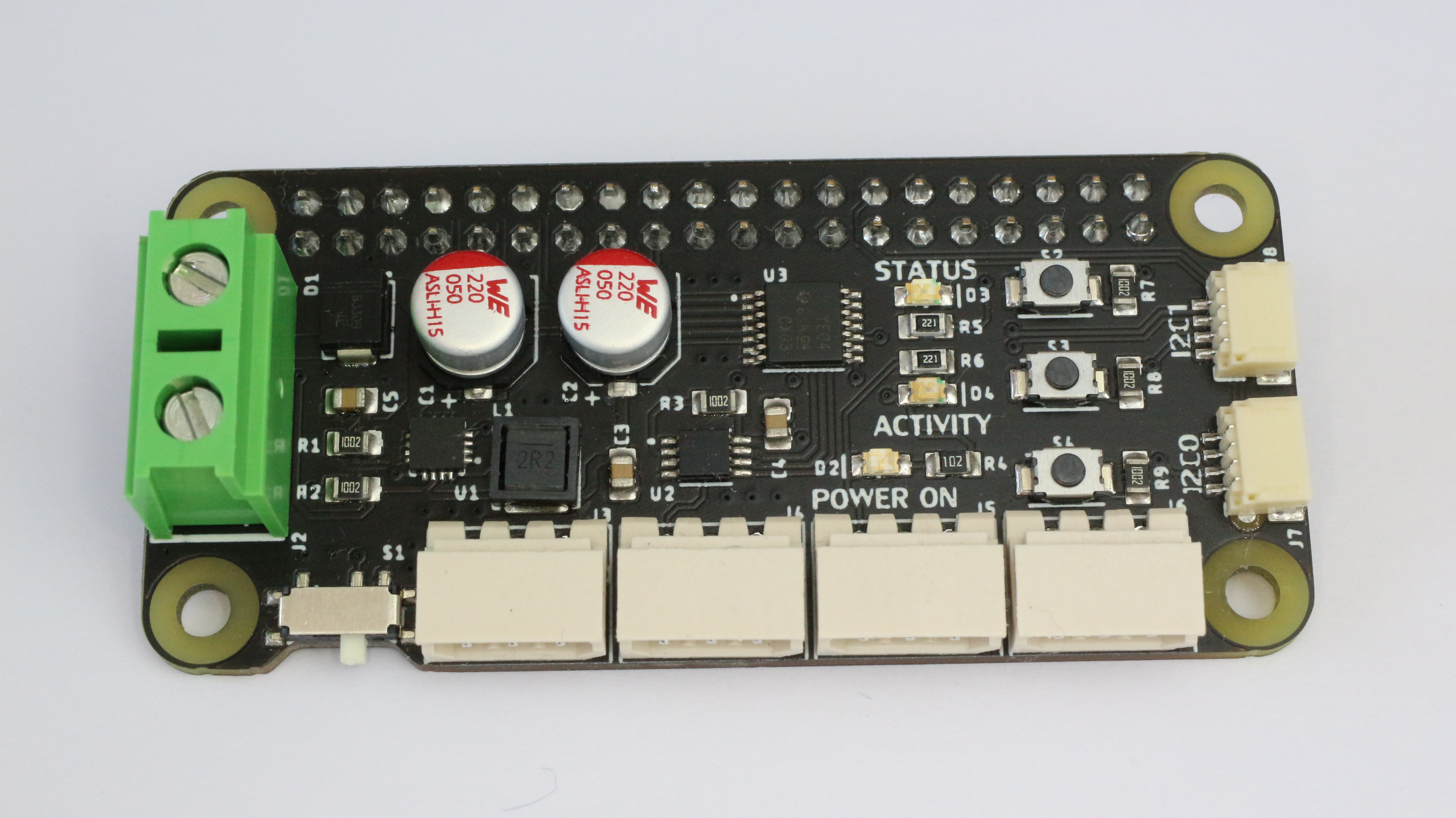
The boards incorporate two I2C ports for sensors for your robotic project. These are JST 1 mm pitch and 4-pin connectors compatible with many boards on the QWIIC family.
There are also 3 LEDs and 3 Buttons for notification and interaction with the electronics, the buttons are programable through the Raspberry GPIOs and 1 LED also GPIO Configurable, the other 2 LEDs are the Activity and PowerOn notification.
Pinout
Test code:
import RPi.GPIO as GPIO
import serial
import time
GPIO.setwarnings(False)
GPIO.setmode(GPIO.BCM)
GPIO.setup(18,GPIO.OUT) # Control Data Direction Pin
GPIO.setup(6,GPIO.OUT) # Blue LED Pin
GPIO.setup(26,GPIO.IN) # S2 Push Button Pin
GPIO.setup(19,GPIO.IN) # S3 Push Button Pin
GPIO.setup(13,GPIO.IN) # S4 Push Button Pin
Dynamixel=serial.Serial("/dev/ttyS0",baudrate=1000000,timeout=0.1, bytesize=8) # UART in ttyS0 @ 1Mbps
while True:
if GPIO.input(26):
GPIO.output(6,GPIO.LOW)
else:
GPIO.output(6,GPIO.HIGH)
GPIO.output(18,GPIO.HIGH)
Dynamixel.write(bytearray.fromhex("FF FF 01 05 03 1E CD 00 0B")) # Move Servo with ID = 1 to position 205
GPIO.output(18,GPIO.LOW)
startDynamixel = Dynamixel.read()
startDynamixel = Dynamixel.read()
idDynamixel = Dynamixel.read()
lenghtDynamixel = Dynamixel.read()
errorDynamixel = Dynamixel.read()
chkDynamixel = Dynamixel.read()
print("Servo ID = " , int.from_bytes(idDynamixel,byteorder='big') , " Errors = ", int.from_bytes(errorDynamixel,byteorder='big'))
time.sleep(1)
if GPIO.input(19):
GPIO.output(6,GPIO.LOW)
else:
GPIO.output(6,GPIO.HIGH)
GPIO.output(18,GPIO.HIGH)
Dynamixel.write(bytearray.fromhex("FF FF 01 04 02 2A 01 CD")) # Read Voltage of Servo with ID = 1
GPIO.output(18,GPIO.LOW)
startDynamixel = Dynamixel.read()
startDynamixel = Dynamixel.read()
idDynamixel = Dynamixel.read()
lenghtDynamixel = Dynamixel.read()
errorDynamixel = Dynamixel.read()
voltDynamixel = Dynamixel.read()
chkDynamixel = Dynamixel.read()
print("Servo Voltage = " , int.from_bytes(voltDynamixel,byteorder='big'))
GPIO.output(18,GPIO.HIGH)
Dynamixel.write(bytearray.fromhex("FF FF 01 04 02 2B 01 CC")) # Read Temperature of Servo with ID = 1
GPIO.output(18,GPIO.LOW)
startDynamixel = Dynamixel.read()
startDynamixel = Dynamixel.read()
idDynamixel = Dynamixel.read()
lenghtDynamixel = Dynamixel.read()
errorDynamixel = Dynamixel.read()
tempDynamixel = Dynamixel.read()
chkDynamixel = Dynamixel.read()
print("Servo Temperature = " , int.from_bytes(tempDynamixel,byteorder='big'))
GPIO.output(18,GPIO.HIGH)
Dynamixel.write(bytearray.fromhex("FF FF 01 04 02 24 02 D2")) # Read Position of Servo with ID = 1
GPIO.output(18,GPIO.LOW)
startDynamixel = Dynamixel.read()
startDynamixel = Dynamixel.read()
idDynamixel = Dynamixel.read()
lenghtDynamixel = Dynamixel.read()
errorDynamixel = Dynamixel.read()
posDynamixel = Dynamixel.read(2)
chkDynamixel = Dynamixel.read()
print("Servo Position = " , int.from_bytes(posDynamixel,byteorder='little'))
time.sleep(1)
if GPIO.input(13):
GPIO.output(6,GPIO.LOW)
else:
GPIO.output(6,GPIO.HIGH)
GPIO.output(18,GPIO.HIGH)
Dynamixel.write(bytearray.fromhex("FF FF 01 05 03 1E 32 03 A3")) # Move Servo with ID = 1 to position 816
GPIO.output(18,GPIO.LOW)
startDynamixel = Dynamixel.read()
startDynamixel = Dynamixel.read()
idDynamixel = Dynamixel.read()
lenghtDynamixel = Dynamixel.read()
errorDynamixel = Dynamixel.read()
chkDynamixel = Dynamixel.read()
print("Servo ID = " , int.from_bytes(idDynamixel,byteorder='big') , " Errors = ", int.from_bytes(errorDynamixel,byteorder='big'))
time.sleep(1)Enable UART at 1Mbps in your Raspberry Pi Zero
Make sure to add the following to your Raspberry config file at /boot/config.txt:
enable_uart=1
init_uart_clock=16000000Assembly Video
This board will be available in my Tindie store very soon: Savage Electronics Tindie

