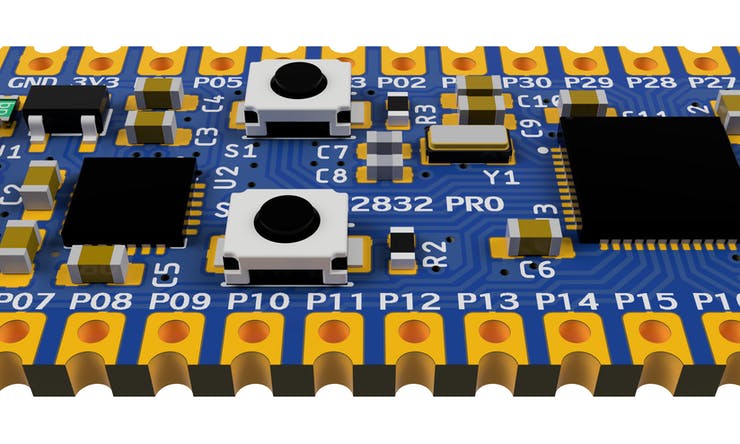
This is a new project using the nRF52832 BLE MCU as a very versatile development platform that will allow me to do many projects that requires a connection over Bluetooth and also can perform actions to control basic systems, as data acquisition, data display, motor control, graphical interfaces and much more.
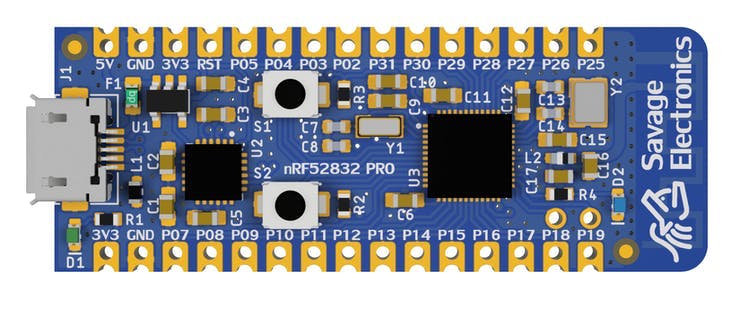
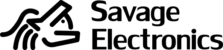
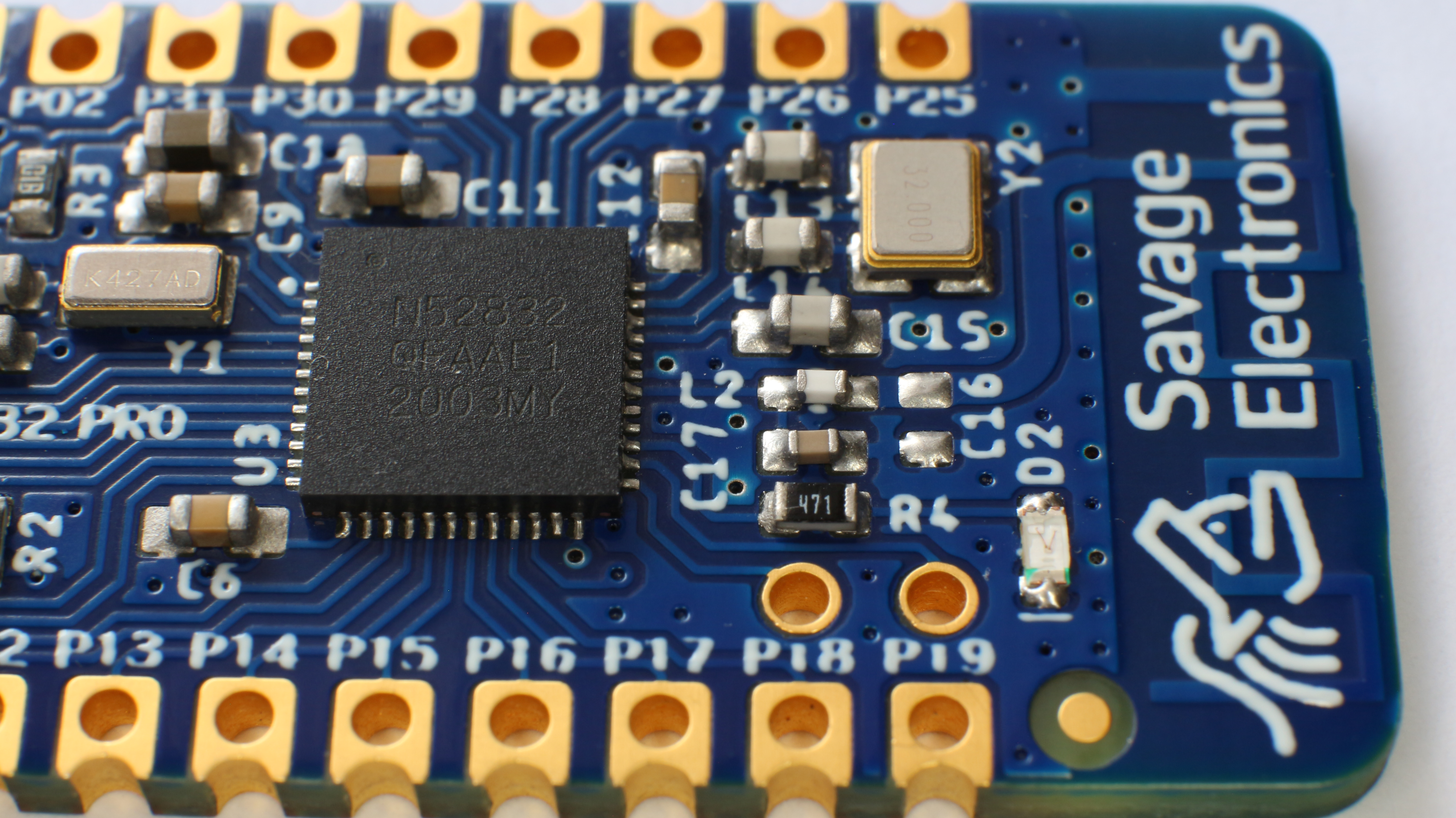
This board dimension is 48x18mm with 30 castellated holes on the side, a micro USB connector for power, and programming through a USB to serial converter CP2104, two tactile switches for user interface and firmware programming, 1 user LED.
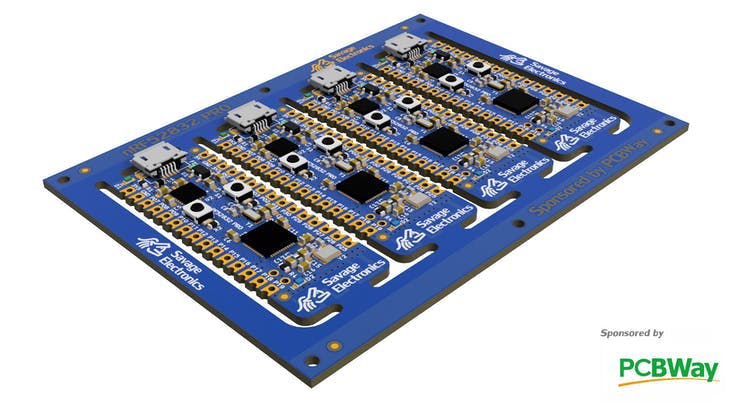
I have made a small panel for easy fabrication, This panel dimensions are 92x66mm including the tooling rails at the sides. In this panel I want to test several things that a usually do not order in a regular PCB, such as tooling rails with tooling holes, external fiducial, Logo with EING finish at the top tooling rail, solder mask and cooper restrictions for text and logos, and castellated holes in a routing job, v-score at the edges of the board as well on the tooling rails.
I quoted this panel in many PCB Manufacturing houses and order some boards for the best price in the market that includes all the characteristics described above with PCBWay. (Even cheaper than the well-know 2 USD – 5PCS PCB Manufacturing House).
These board are now getting manufactured, the customer service has been awesome so far, as I ask to place the UL Marking on the Top Silkscreen layer in the bottom layer of this panel and received a preview of confirmation of this requirement, and received awesome feedback regarding the Vscore and Solder mask capabilities.
Making this board possible required some knowledge in PCB Manufacturing that I will below describe the research and application.
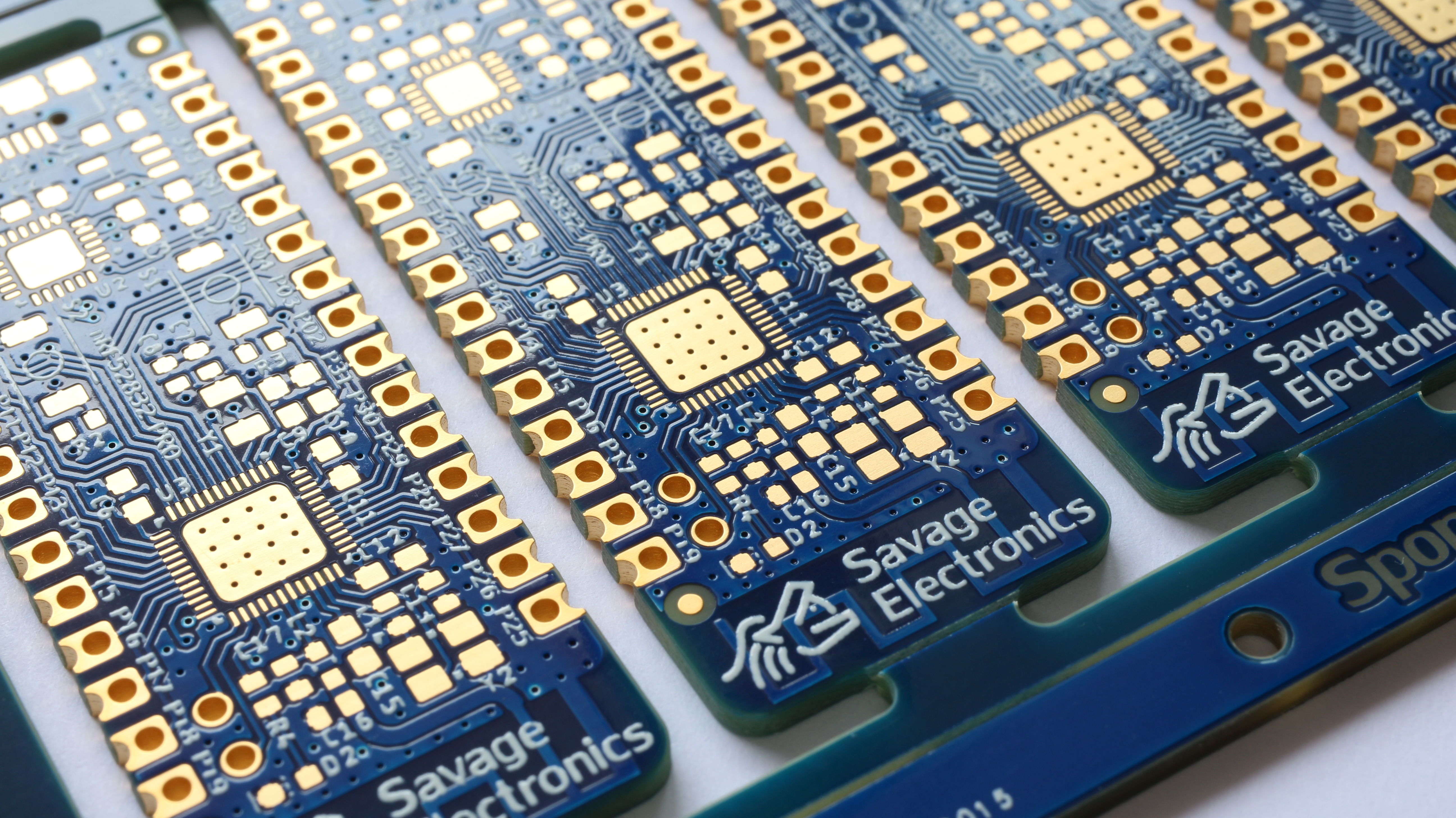
Castellated Holes: Also know as castellations are plated through-holes or vias at the edge of a board cut in the middle by a router making them pads that can be soldered to another PCB and make subassemblies.
The PCBs have finally arrived, here are some photos.
If you are thinking about ordering some PCBs and start your own prototypes I recommend you to try PCBWay.