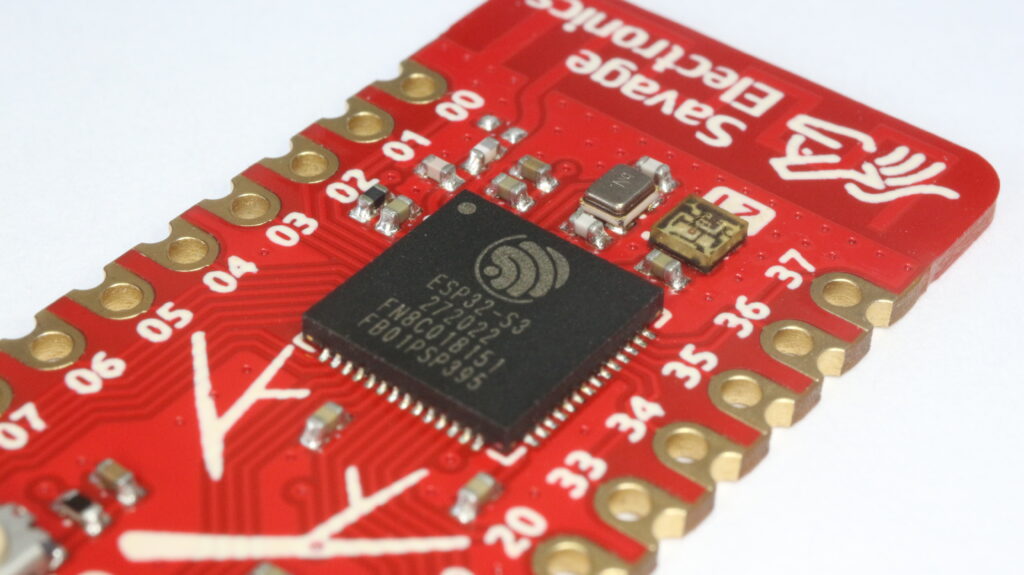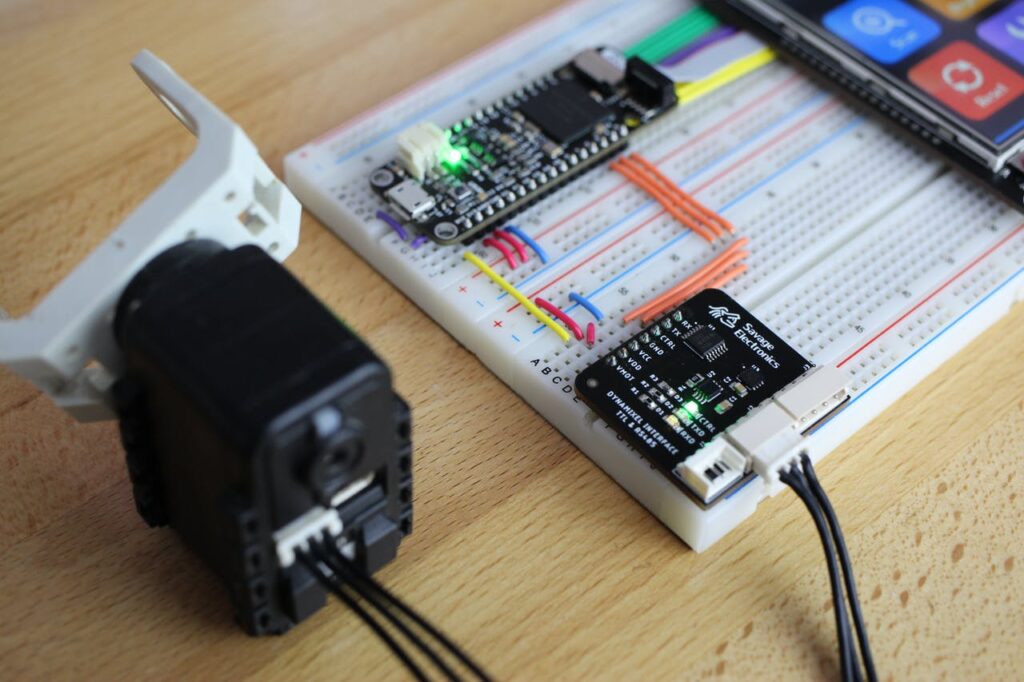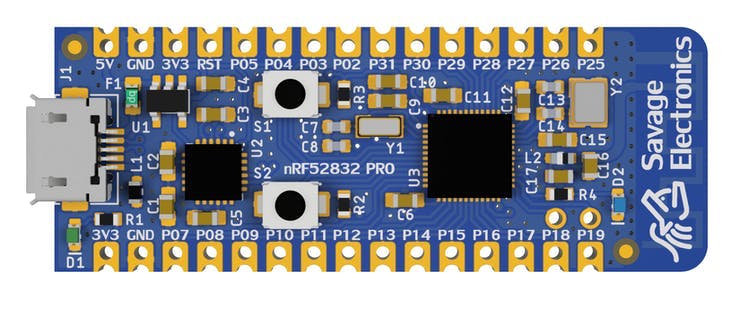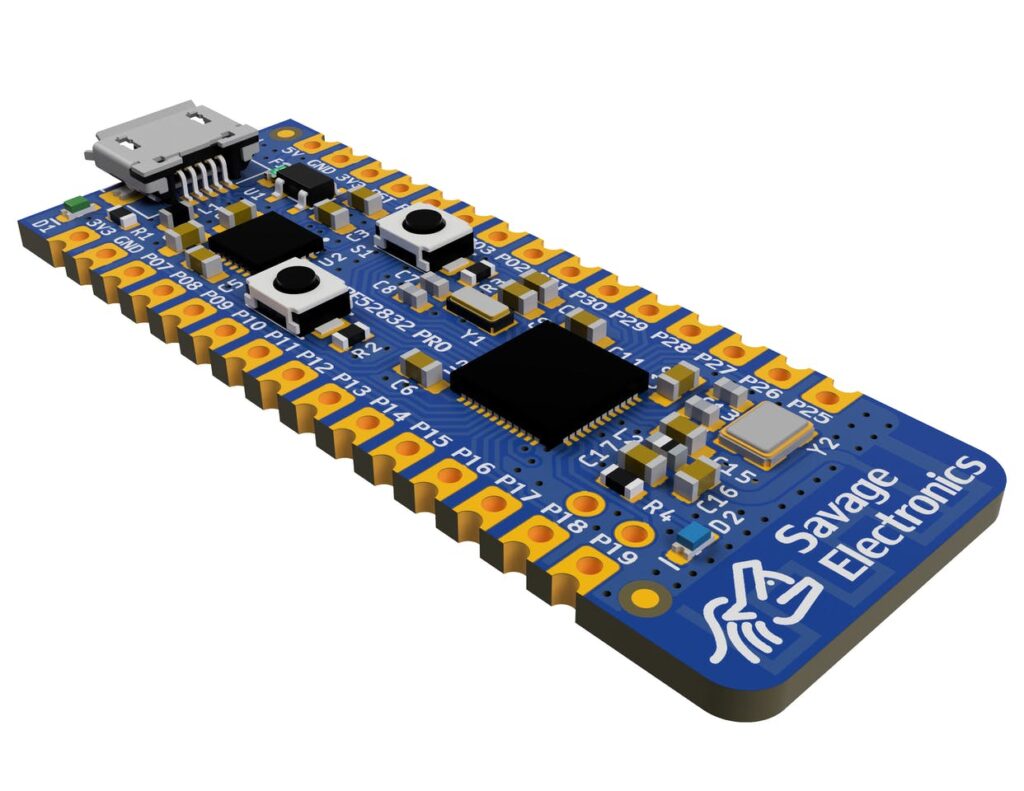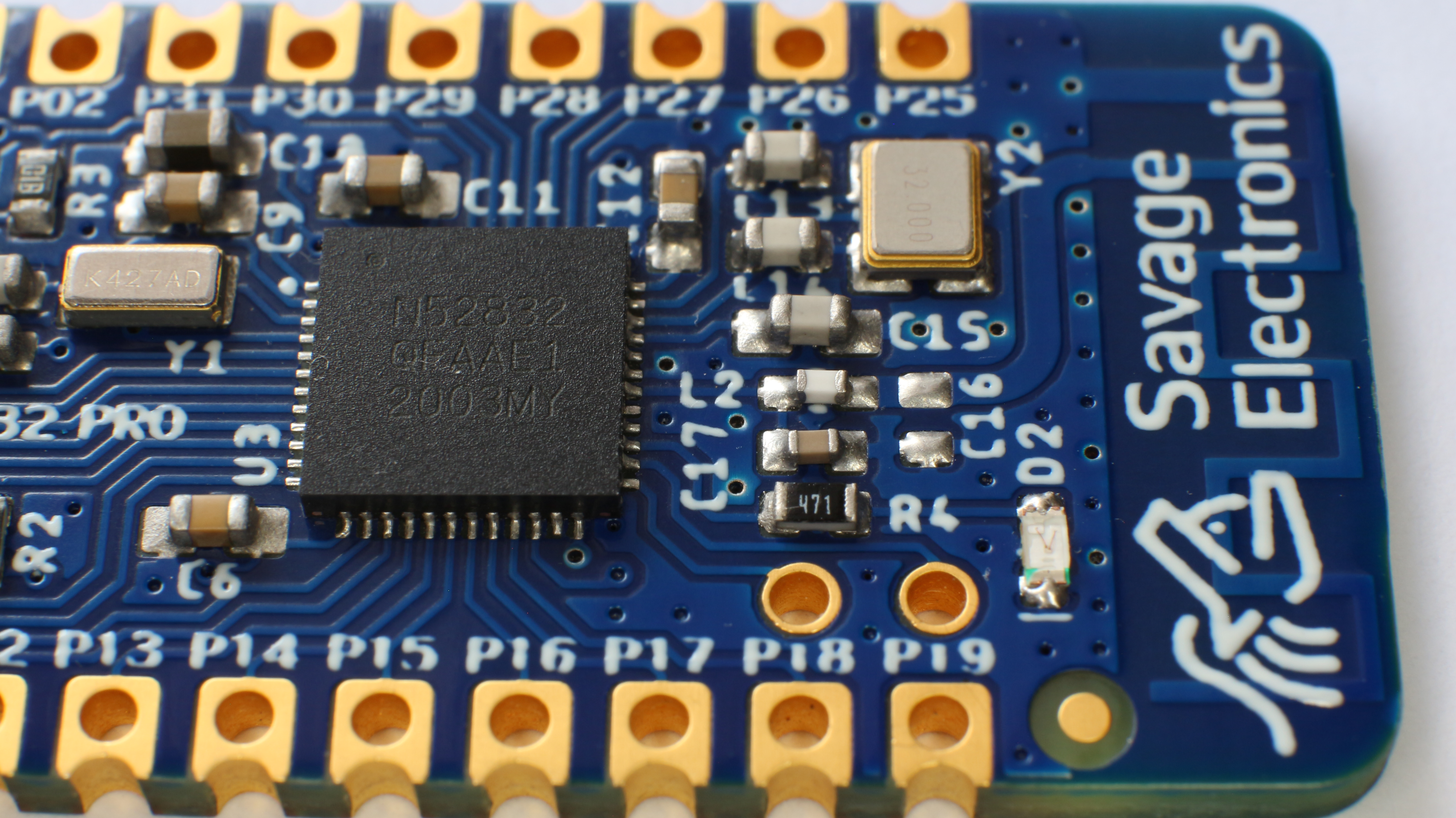
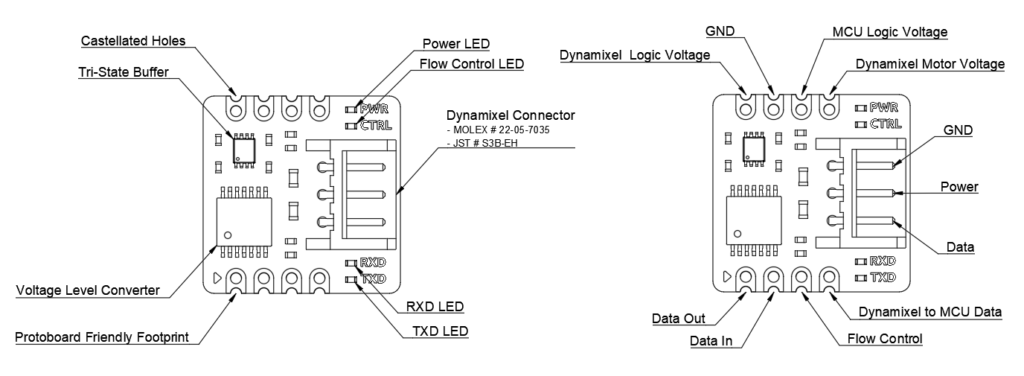
The Dynamixel Interface is a board that allows easy communication with a MCU or Processor with a simple UART module, the board integrates a voltage level converter and a Tri-state buffer to accomplish good communication between a Dynamixel servomotor and almost any microcontroller in the market. The board is breadboard-friendly and development ready as the connection pins are 0.1″ standard pitch and the castellated holes for SMD mounting and manufactured by PCBWay.
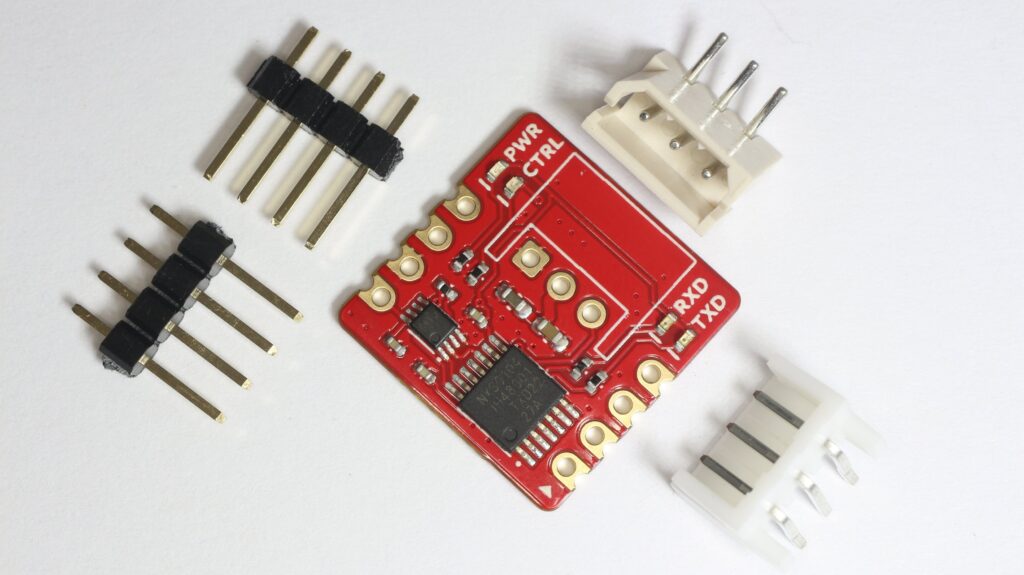
The Dynamixel interface is now easier to connect with a bunch of microcontrollers thanks to its voltage converter IC which makes possible the communication with low-power MCUs or even FPGAs, the interface offers communication indications LED for RX and TX, as well for the flow communication pin.
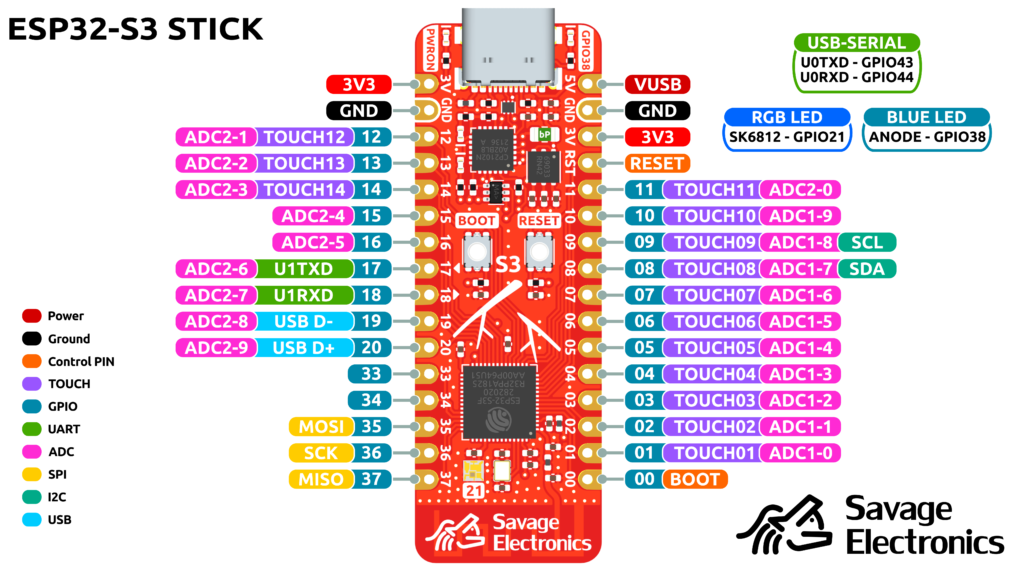
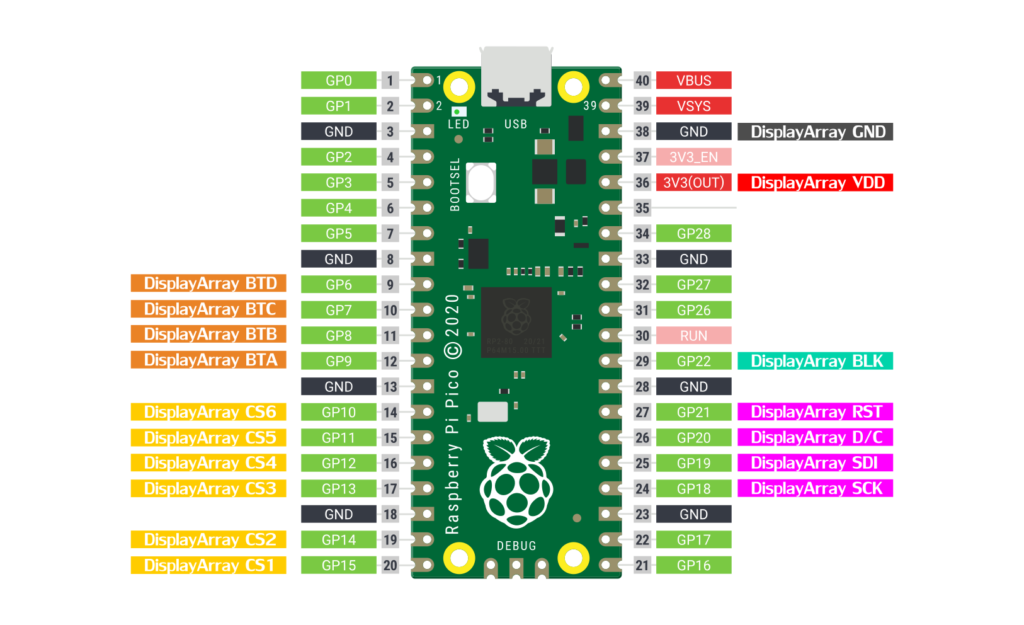
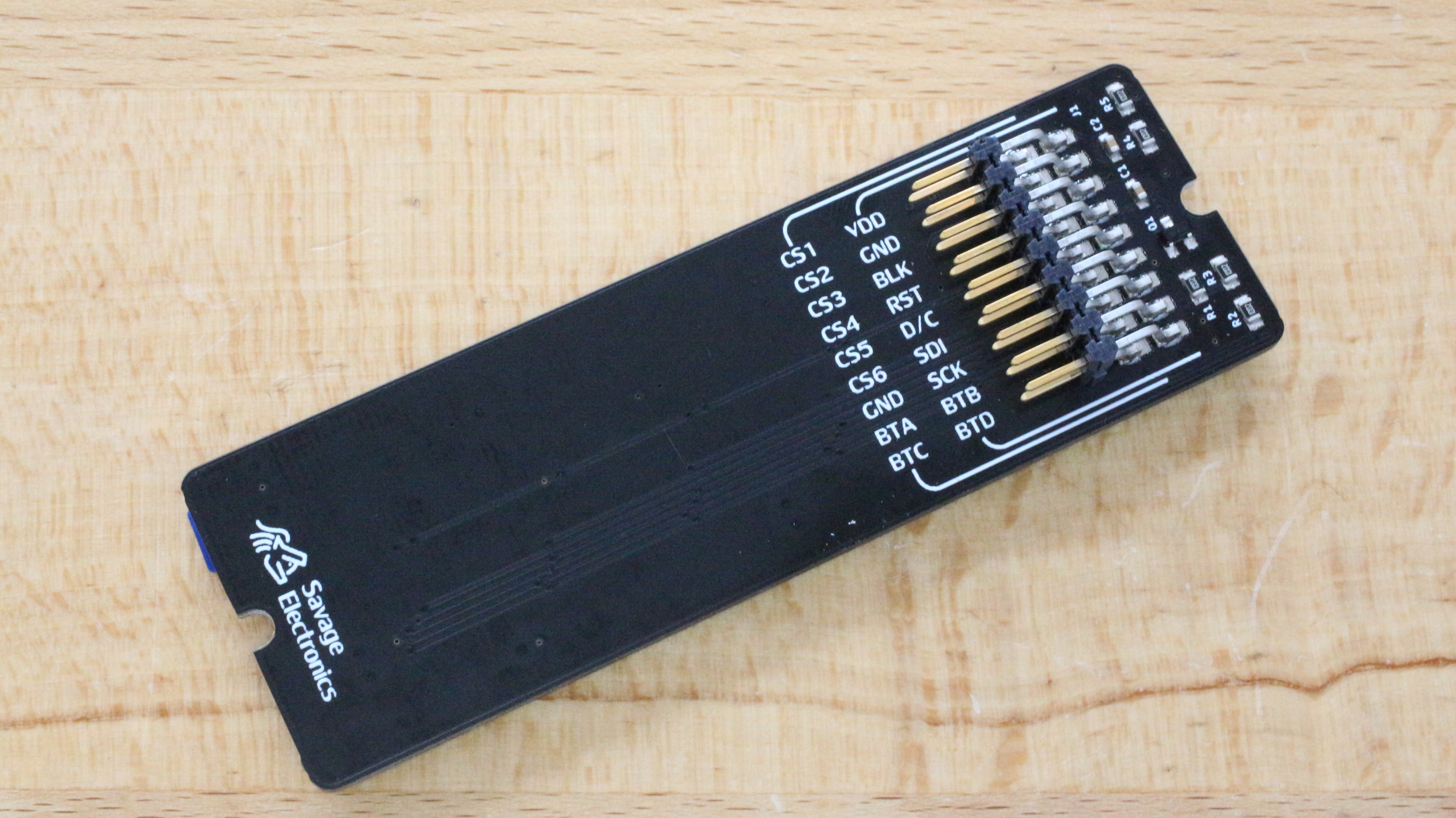
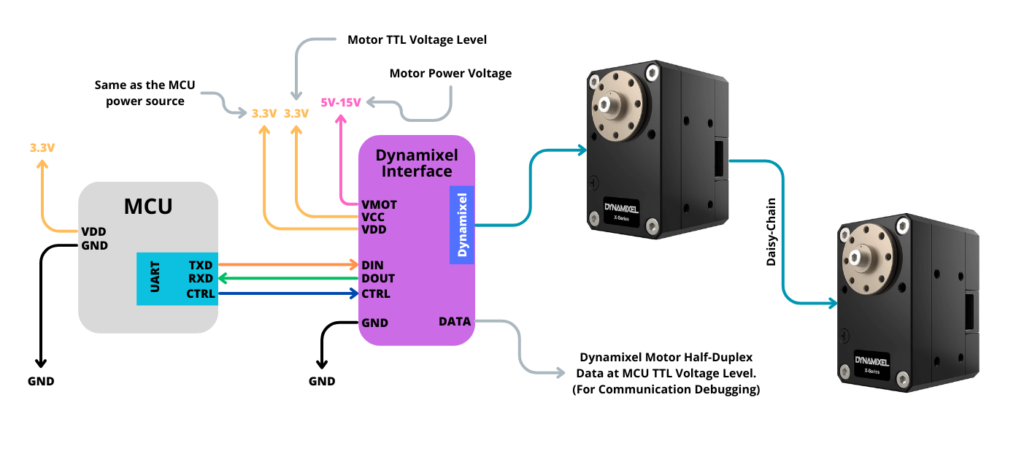
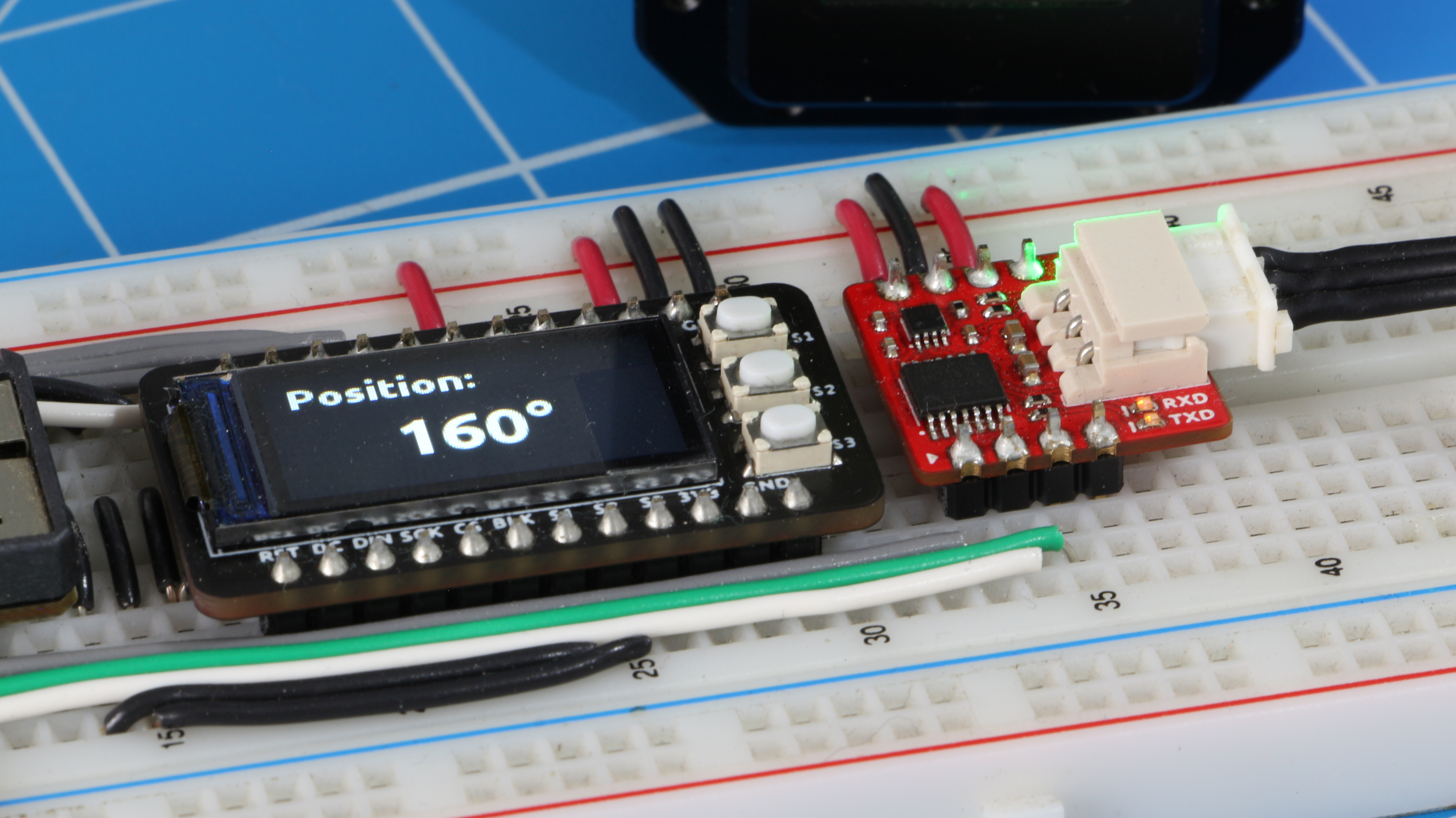
The connection to the MCU is as simple as providing power to the interface and connecting the 3 pins for the UART ( CTRL, TX, and RX ). I would use the following configuration for all the newest X-Series motors as well as for the old AX and MX Series motors with any 5V to 3.3V MCU like Arduino, PIC, STM, and ESP32.
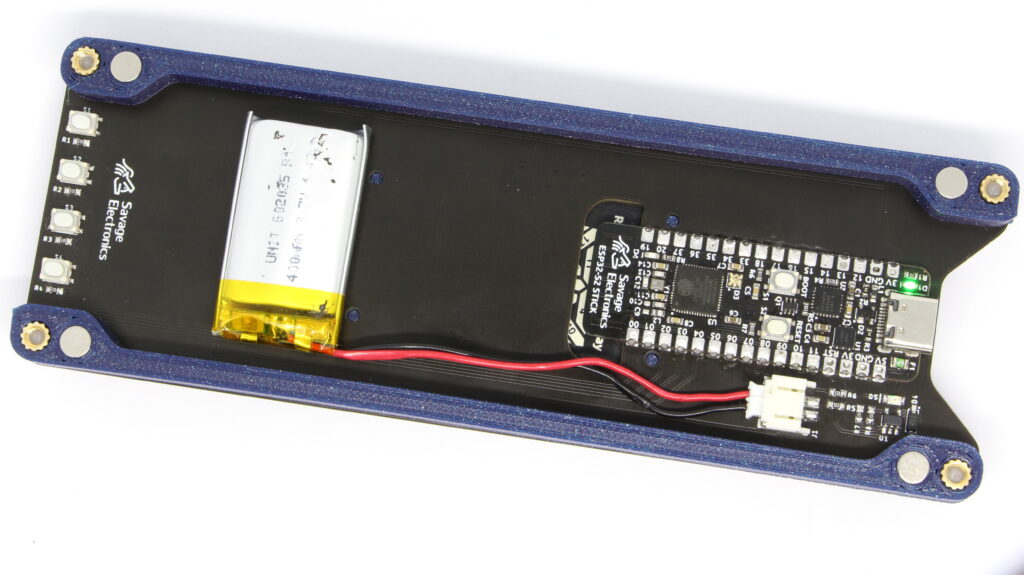
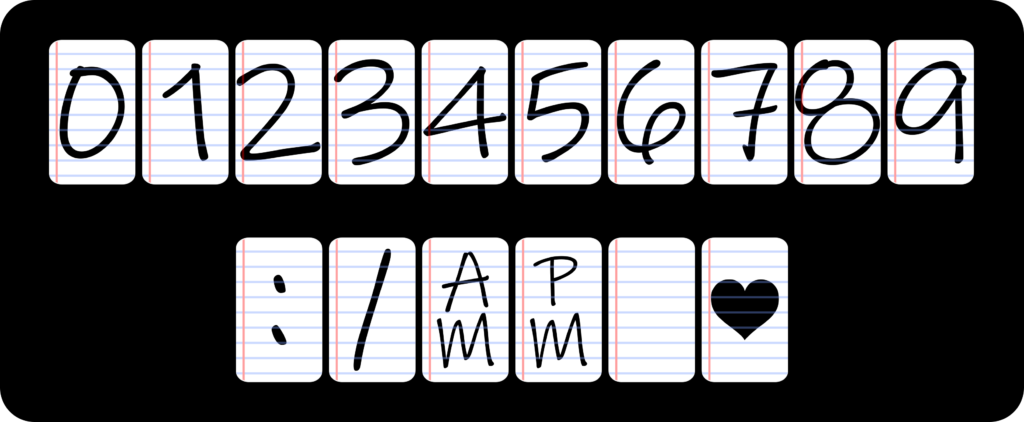
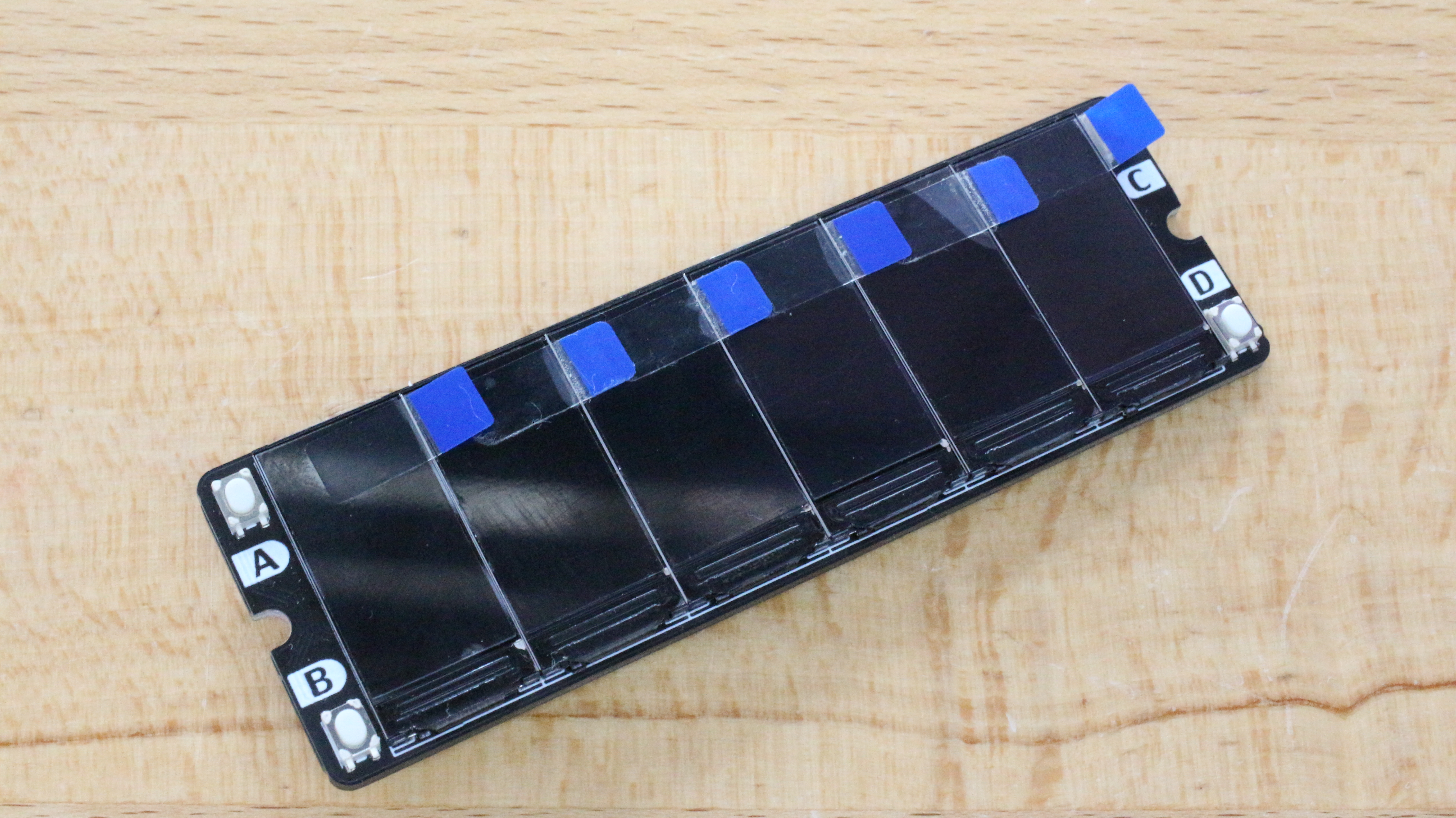
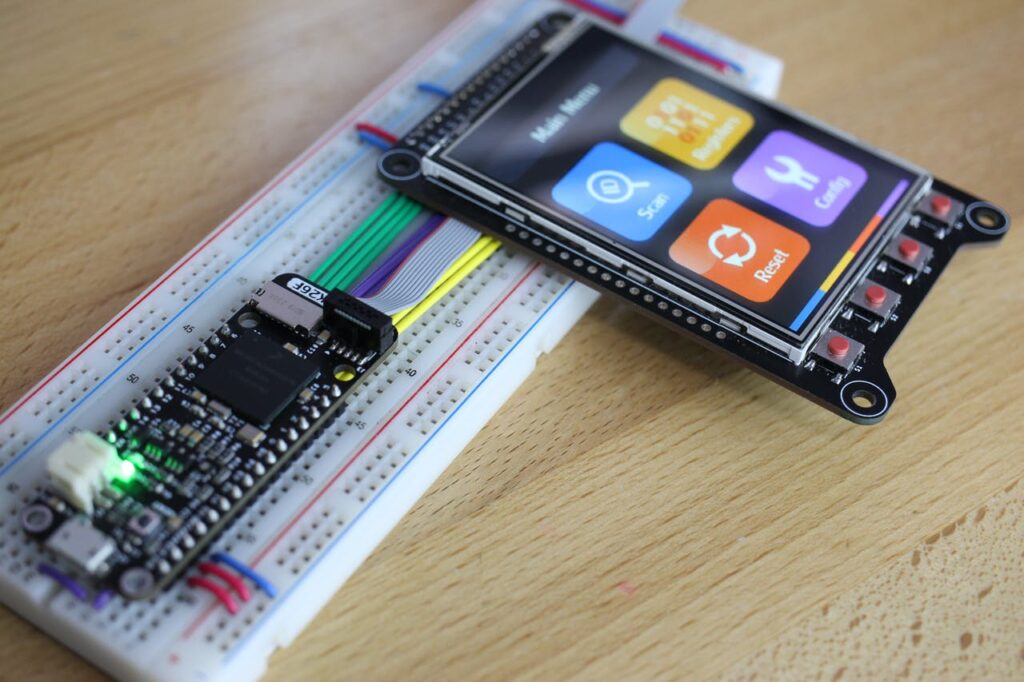
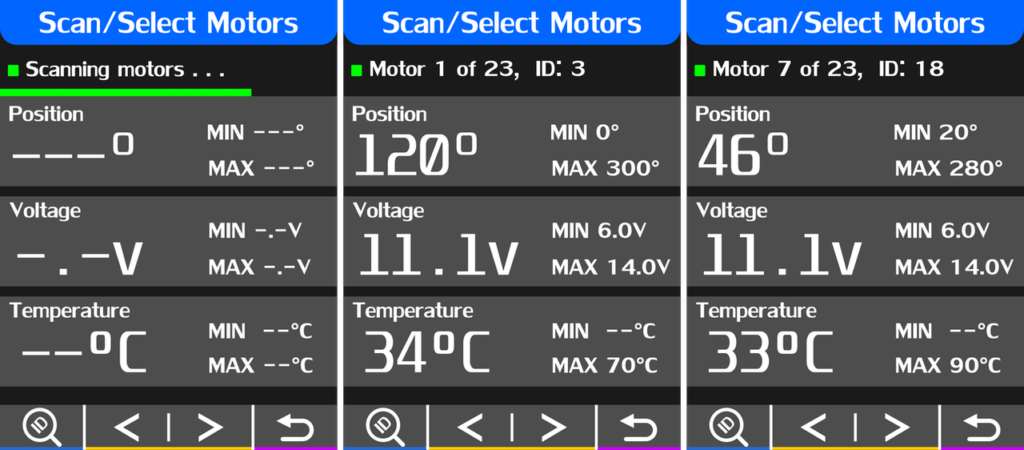
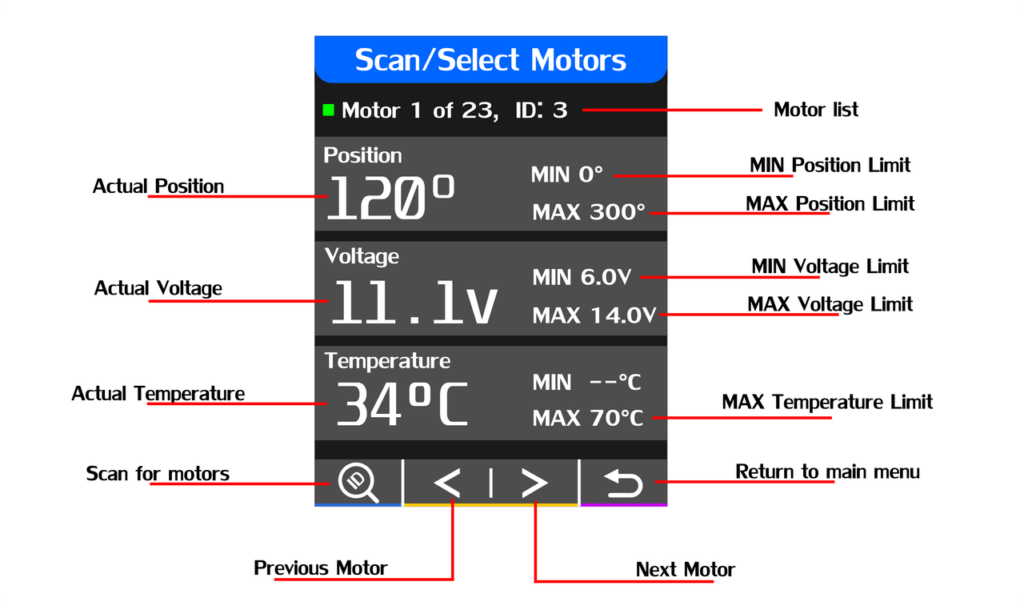
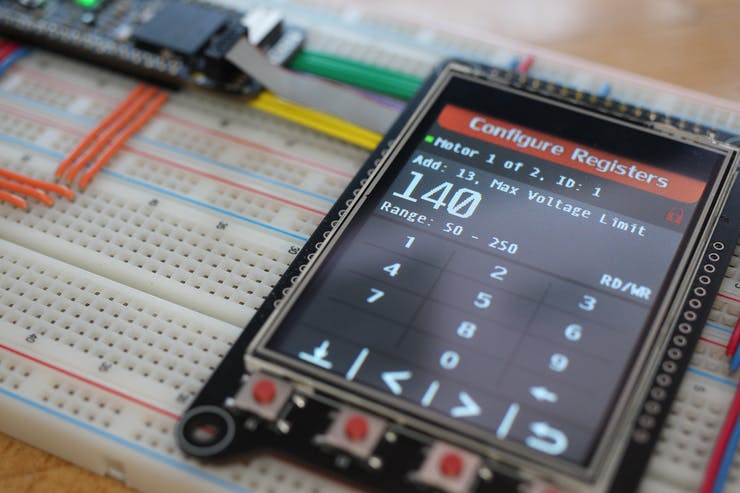
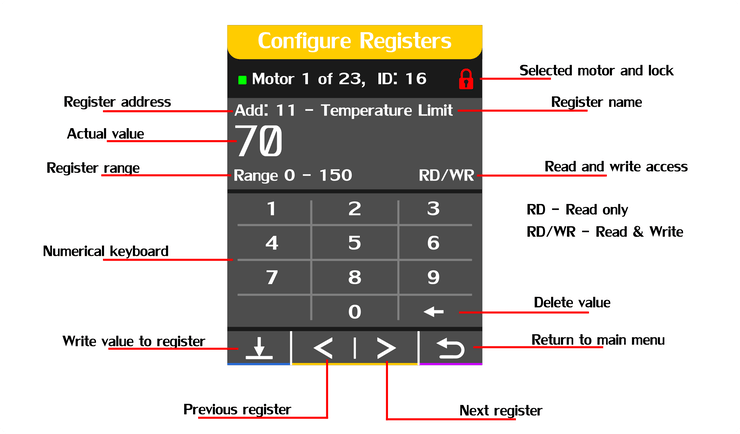
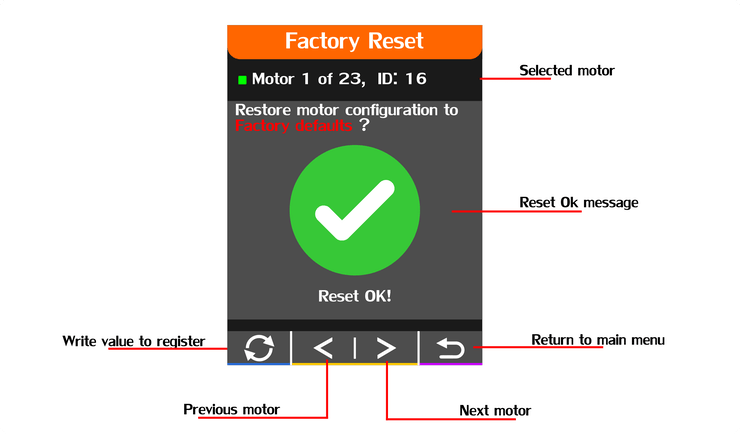
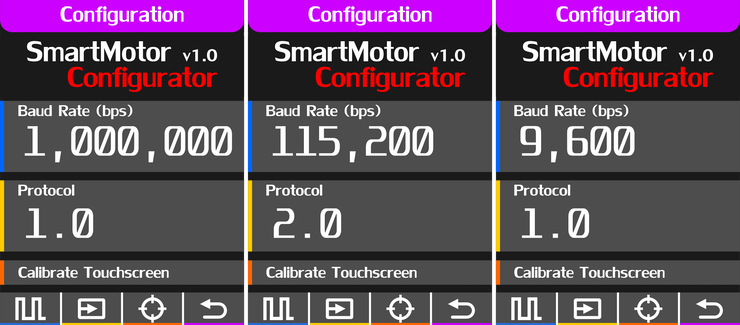
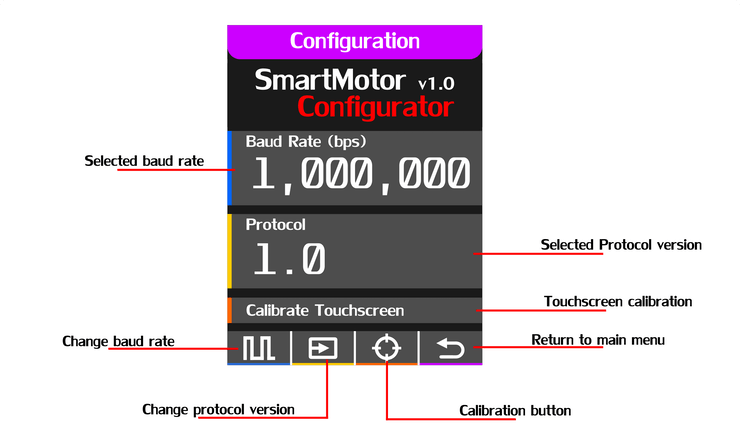
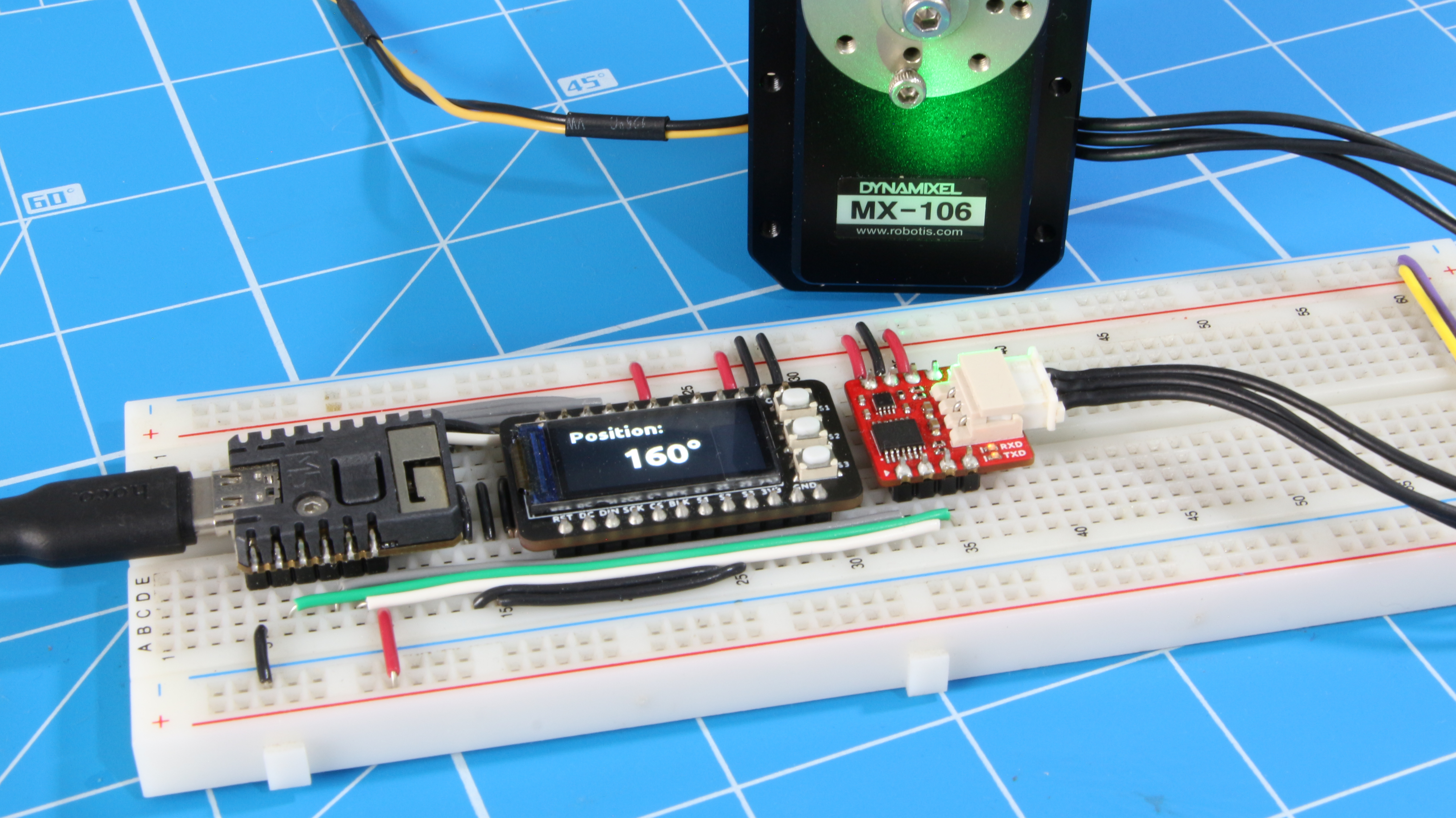
I have tested the interface with an M5Stack Stamp S3 MCU along with an ST7735 LCD showing the motor position and moving the motor with the 3 push-buttons.
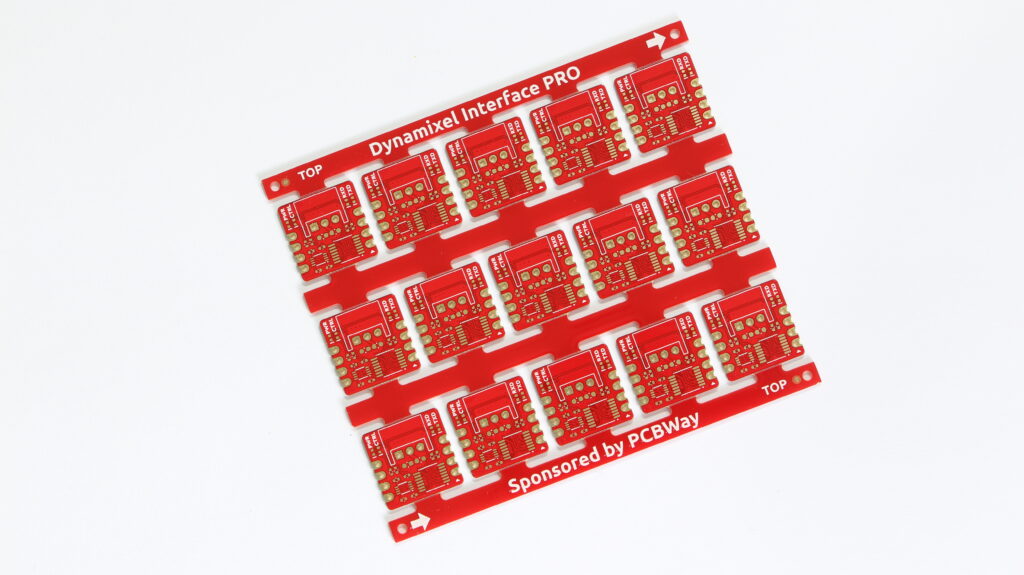
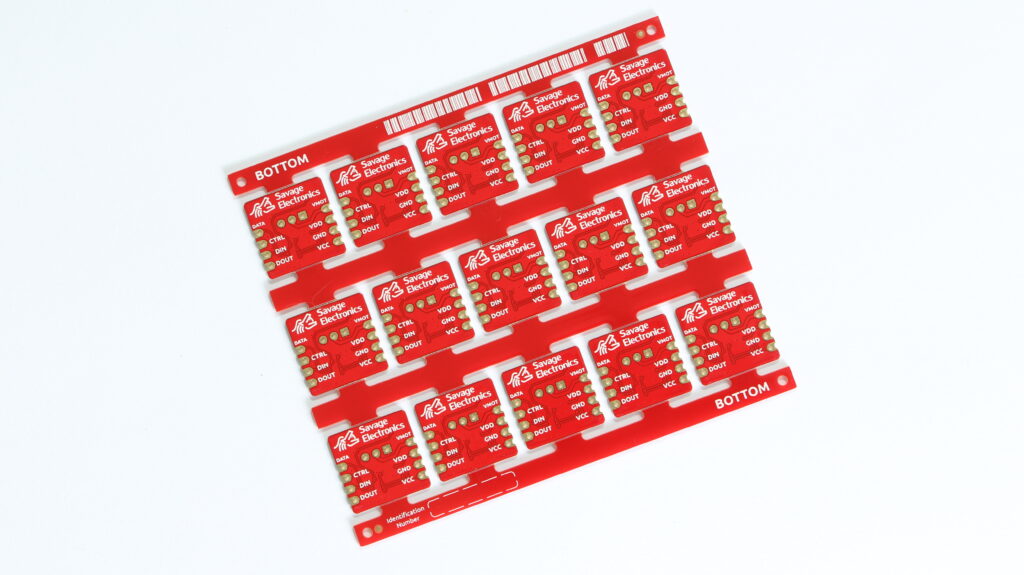
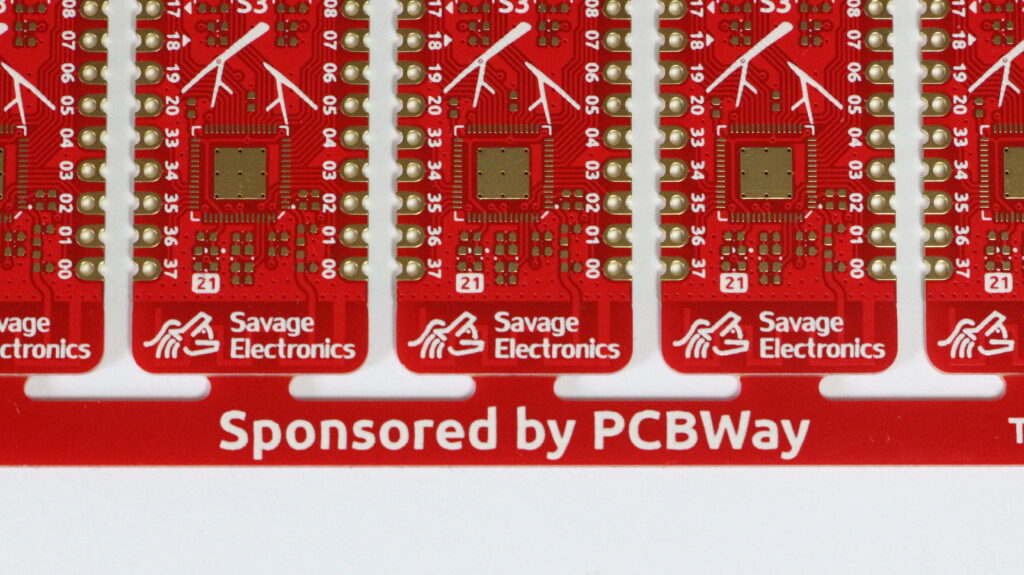
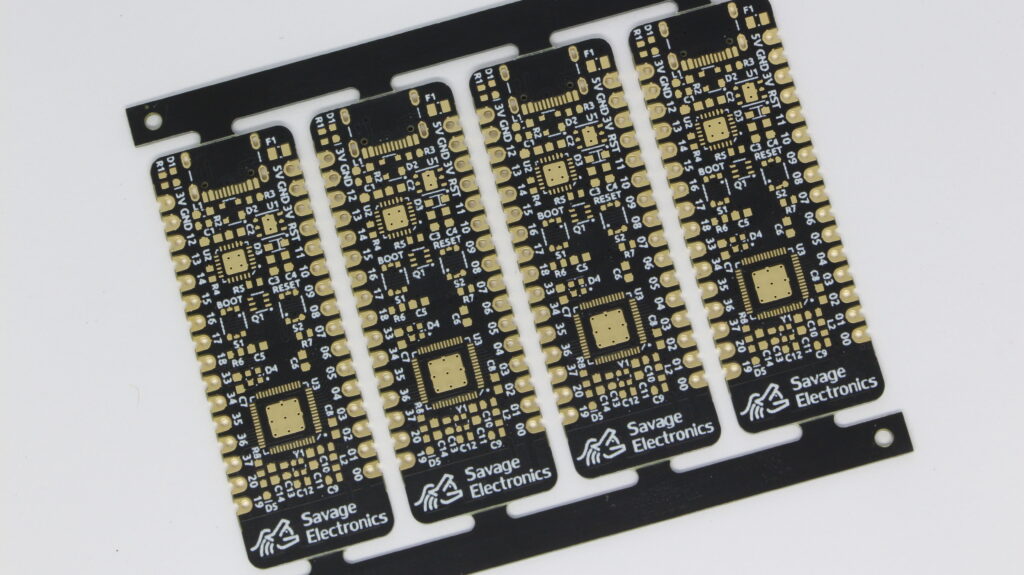
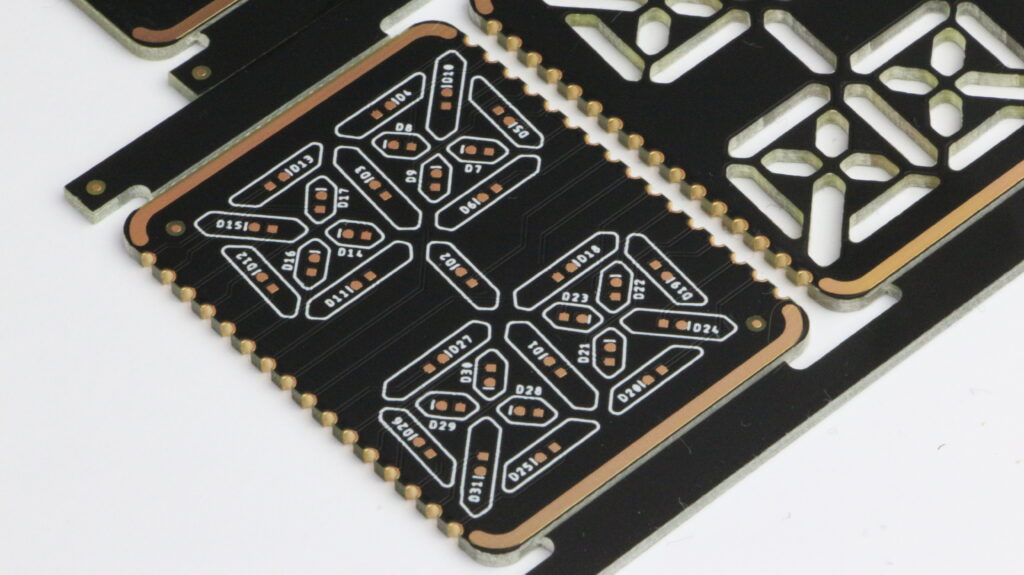
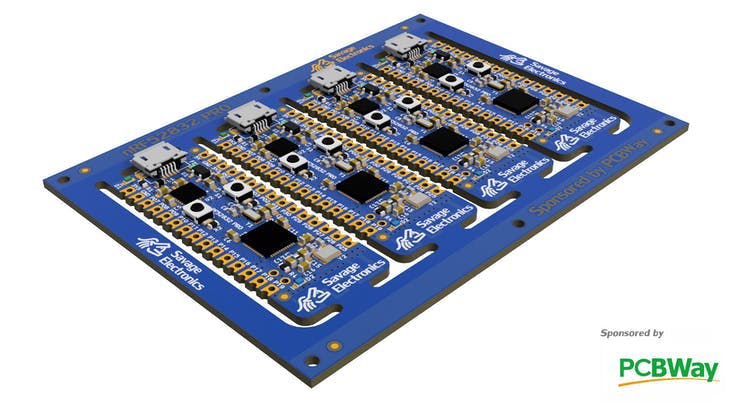
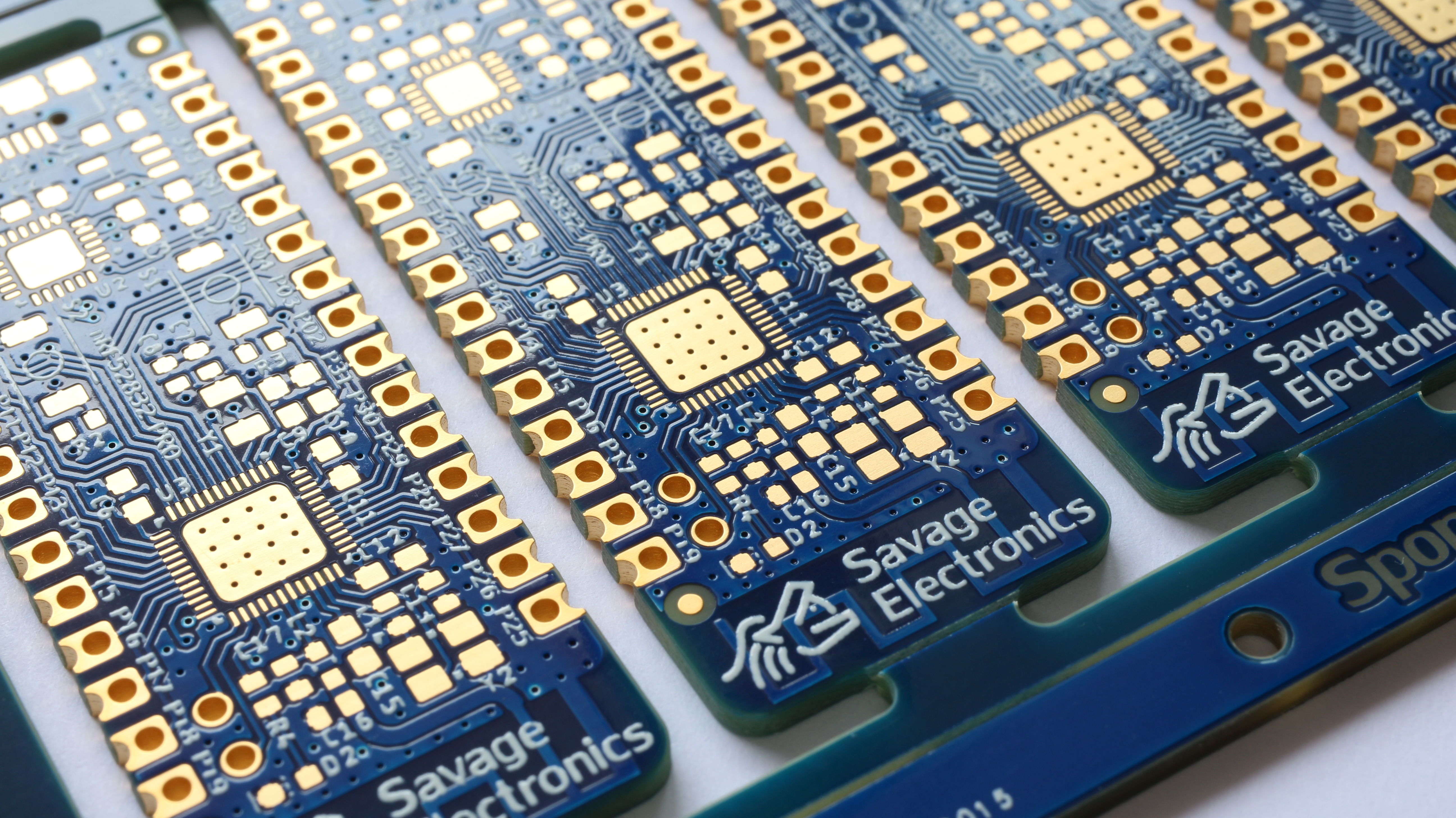
The castellated holes are one of the features that I most like about the PCBWay manufacturing skills, they always come just great even when choosing thinner PCB panels, and this design was not the exception, so I ordered some panels.
If you have intentions to fabricate more than one PCB of your design I really recommend panelizing your PCB in order to obtain the best deal and to have some spares in case the magic smoke decides to take some of those boards, I usually do my panels to fit almost the same PCB space as all my panels but you can also do your panel bigger or just let PCBWay to designed for you.
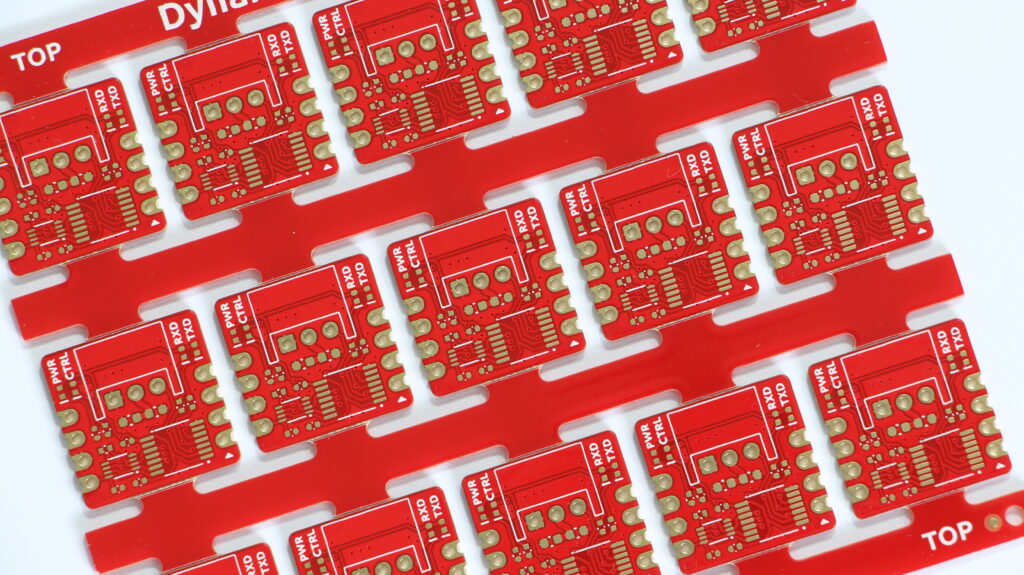
In this case, I decided to design my own Panel but I am sure that you can specify how would you like your panel to be made as some special silkscreen like identifications numbers, holes, fiducials, PCB batch number, PCB side, and feed direction for your PnP and so much more.